| Глава 3. Асинхронные машины | |
|---|---|
| 3-21.3. Работа при несимметричных напряжениях | часть 1 |
|
Работа трехфазного двигателя даже при небольшой несимметрии напряжений на его зажимах может привести к недопустимому нагреванию его обмоток, если он имеет на валу номинальную нагрузку или близкую к ней.
Исследование такой работы производится при
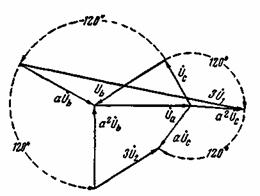
помощи метода симметричных составляющих. Заданную систему напряжений
Аналогично уравнениям для токов
Согласно этим уравнениям на
рис. 3-72
построена диаграмма для определения
Рис. 3-72. Определение
Критерием для оценки несимметрии напряжений
служит отношение
Далее рассчитываем:
После этого получим:
и отсюда модули симметричных составляющих:
При симметричных обмотках статора и ротора мы можем считать, что обе системы напряжений U1 и U2, действуют независимо одна от другой При U1 > U2 ротор будет вращаться в сторону вращения поля, соответствующего напряжениям прямой последовательности U1. Будем это поле называть прямо вращающимся или прямым.
По отношению к напряжениям
U1
машина будет работать в режиме двигателя со скольжением
Поле, соответствующее напряжениям обратной последовательности U2 будет вращаться против вращения ротора. Будем его называть обратно вращающимся или обратным. По отношению к напряжениям U2 машина будет работать в режиме тормоза со скольжением
Токи статора, вызванные напряжениями
U2,
являются токами обратной последовательности. Обозначим их через
I12.
Токи
|
3-1.
3-21. |