| Глава 3. Асинхронные машины | |
|---|---|
| 3-23. Асинхронные исполнительные двигатели | часть 1 |
|
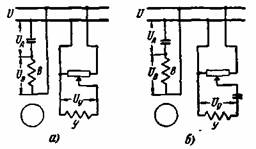
Для осуществления автоматического управления, регулирования или контроля во многих случаях требуется преобразование «электрического сигнала» в механическое вращение. При этом применяются исполнительные двигатели, в качестве которых часто используются асинхронные двигатели с двумя обмотками на статоре и короткозамкнутым ротором. Обмотки в пазах статора размещаются так же, как в однофазном двигателе, имеющем главную и вспомогательную фазы. Обычные схемы включения асинхронных исполнительных двигателей приведены на рис. 3-98. Рис. 3-98. Схемы включения асинхронных исполнительных двигателей. Здесь одна из фаз статора называется обмоткой возбуждения (В), а другая фаза — обмоткой управления (У). Такие схемы позволяют пускать в ход и останавливать двигатель и регулировать его частоту вращения путем изменения напряжения UУ на обмотке управления; при этом обмотка возбуждения остается приключенной к сети. В отличие от обычных асинхронных двигателей к исполнительным асинхронным двигателям предъявляется ряд особых требований:
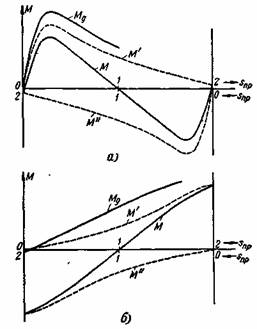
Под самоходом двигателя понимается его вращение после снятия сигнала (напряжения) с обмотки управления. Такого вращения (самохода) не должно быть. Двигатель должен быстро останавливаться после отключения обмотки управления. В противном случае он перестает быть управляемым. Для устранения самохода двигателя необходимо, чтобы обмотка его ротора имела большое активное сопротивление. Обратимся к рис. 3-99, где показаны кривые моментов однофазного двигателя (включена только одна обмотка В): от прямого поля М', от обратного поля М" и результирующего М; здесь же показана кривая момента Mg двухфазного двигателя (включены обе обмотки В и У).
Рис. 3-99. Кривые моментов двигателя при
различных активных сопротивлениях роторной обмотки. Из рис. 3-99,а следует, что при отключении обмотки У работа двигателя переходит с кривой Mg на кривую М и двигатель будет продолжать вращаться в направлении вращения прямого поля, если момент М равен тормозящему моменту на его валу. Следовательно, в этом случае имеем самоход двигателя. Кривые тех же моментов двигателя, обмотка ротора которого имеет большое активное сопротивление, показаны на рис. 3-99,б. Из этого рисунка следует, что здесь самохода не будет, так как при отключении обмотки У работа двигателя переходит с кривой Mg (при скольжении ротора относительно прямого поля sпр < l) на кривую М и двигатель быстро тормозится.
|
3-1.
3-23. |