| Глава 3. Асинхронные машины | |
|---|---|
| 3-25. Асинхронный преобразователь частоты | часть 1 |
|
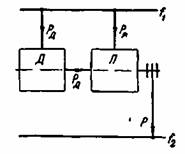
Электрическую энергию на заводах, фабриках, при строительных работах, в шахтах, сельском хозяйстве обычно получают от сети трехфазного тока нормальной частоты 50 Гц. Для преобразования тока в другую частоту может быть использован асинхронный преобразователь частоты, представляющий собой асинхронную машину с контактными кольцами, приводимую во вращение каким-либо двигателем. Приводным двигателем обычно служит короткозамкнутый асинхронный двигатель. Асинхронные преобразователи частоты широко применяются для повышения частоты тока, например, в тех случаях, когда для питания быстроходных асинхронных двигателей требуется ток более высокой частоты, чем 50 Гц. Другие агрегаты для преобразования частоты тока (например, синхронный генератор с приводным двигателем) в тех же случаях оказываются более дорогими, особенно при небольших мощностях. На рис. 3-103 представлена принципиальная схема включения асинхронного преобразователя частоты. Обмотка статора преобразователя (П) приключается к первичной сети нормальной частоты f1, а его обмотка ротора через посредство контактных колец и щеток — ко вторичной сети частоты f2. Приводной двигатель (Д) также приключается к первичной сети. Рис. 3-103. Схема включения асинхронного преобразователя частоты. Для повышения частоты (f2 > fi) ротор преобразователя приводится во вращение против поля. Тогда э.д.с. E2s = sпE2, наведенная в его обмотке, будет иметь частоту f2 = sпf1 > fi, так как при вращении против поля скольжение преобразователя sп > l.
Полная электрическая мощность Рэ2
цепи ротора при s
>
l
складывается из мощности Рэм,
перенесенной вращающимся полем со статора на ротор, и мощности
В соответствии с известными соотношениями [см. (3-69) и (3-70а)] можем написать: Если двигатель имеет рд пар полюсов, а преобразователь рп пар полюсов, то скольжение преобразователя где n1 — частота вращения поля преобразователя; n2 — частота вращения его ротора (скольжением двигателя пренебрегаем).
Допустим, что в машинах нет потерь. Тогда
будем иметь (рис. 3-103) Рэ2 = Р (мощности
вторичной сети); Рэм = Рп (мощности
преобразователя) и Если преобразователь служит, например, для преобразования тока частоты f1 =50 Гц в ток частоты f2 = 150 Гц, то его скольжение sп = f2/f1 = 3, что согласно (3-242) можно получить при рд = 1 и рп = 2; тогда по (3-243) Рп = 0,33Р и Рд = 0,67Р.
|
3-1.
3-25. |