| Глава 3. Асинхронные машины | |
|---|---|
| 3-25. Асинхронный преобразователь частоты | часть 2 |
|
Действительные мощности, потребляемые
преобразователем и двигателем из первичной сети, будут из-за потерь больше
примерно на 25 — 35% для преобразователей небольшой мощности (5 — 30 кВА
при cosφ2
= 0,8
К недостаткам асинхронного преобразователя
частоты следует отнести довольно большое падение напряжения
U2
на его вторичных зажимах при переходе от холостого хода к номинальной
нагрузке (до 10 — 30% при
cosφ2
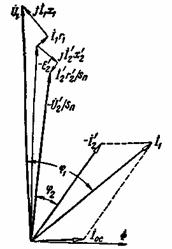
= 1 В большинстве случаев нагрузку преобразователя со вторичной стороны составляют асинхронные двигатели. Тогда при переходе этих двигателей от работы вхолостую к работе с нагрузкой изменение U2 будет небольшим в соответствии с небольшим изменением потребляемой ими реактивной мощности. При изготовлении асинхронных преобразователей частоты могут быть использованы части нормальных (серийных) асинхронных двигателей с контактными кольцами. Однако при этом следует иметь в виду, что частота перемагничивания ротора велика (f2 = sпf1). Поэтому необходимо существенно снизить значения индукции в его зубцах и ярме. Для преобразователя можем написать следующие уравнения напряжений и токов:
где
Рис. 3-104. Векторная диаграмма асинхронного преобразователя частоты.
|
3-1.
3-25. |