| Глава 3. Асинхронные машины | |
|---|---|
| 3-23. Асинхронные исполнительные двигатели | часть 2 |
|
Активное сопротивление роторной обмотки
выбирается таким образом, чтобы критическое скольжение двигателя в
однофазном режиме было больше единицы; обычно
sк
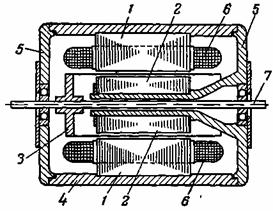
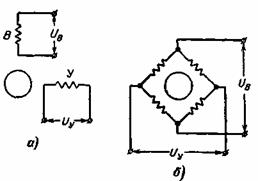
= 2 Большое сопротивление обмотки ротора исполнительного двигателя в то же время обеспечивает его устойчивую работу при широких пределах изменения напряжения на обмотке управления. Линейность регулировочных характеристик [п = f(Uу) при Mg = const] и механических характеристик [n = f(Mg) при Uу = const] также в значительной степени обеспечивается при большом активном сопротивлении обмотки ротора; при этом под линейностью характеристик здесь понимается их приближение к пропорциональным зависимостям. Из схем включения асинхронных исполнительных двигателей следует предпочесть схему на рис. 3-98,б, так как при этой схеме вследствие компенсации индуктивного сопротивления обмотки У емкостью заметно снижается мощность управления и в то же время возрастает начальный пусковой момент. Быстродействие двигателя будет определяться практически только моментом инерции его вращающихся частей, так как электромагнитные процессы здесь затухают весьма быстро из-за относительно больших активных сопротивлений его обмоток. Наибольшее быстродействие имеет двигатель с немагнитным полым ротором. Асинхронный исполнительный двигатель с немагнитным полым ротором наиболее часто применяется как исполнительный двигатель переменного тока в различных схемах автоматических устройств. Мощность его колеблется от десятых долей ватта до нескольких сотен ватт при частоте вращения от 1 500 до 30 000 об/мин. Конструкция двигателя представлена на рис. 3-100, и схемы включения его обмоток — на рис. 3-101.
Рис. 3-100. Двигатель с немагнитным полым
ротором.
Рис. 3-101. Схемы включения обмоток
статора.
Внешний статор 1 собирается из
тонких лакированных листов электротехнической стали толщиной 0,2
Внутренний статор 2 также собирается из лакированных листов электротехнической стали и служит для уменьшения магнитного сопротивления главному потоку, проходящему через зазор. Он насаживается на цилиндрический выступ щита. Полый ротор 3 представляет собой тонкостенный стакан, выполняемый обычно из алюминиевого сплава. Дно стакана жестко укрепляется на валу 7. Толщина его стенки колеблется от 0,2 до 1 мм. Такой ротор имеет очень небольшой момент инерции, что во многих случаях и требуется от исполнительного двигателя. Зазором в двигателе следует считать зазор между внешним и внутренним статорами. Он относительно велик: 0,5 — 1,5 мм. Вследствие этого возрастают намагничивающие токи обмоток, что приводит к увеличению электрических потерь в них. Кроме того, большие электрические потери возникают в роторе. Поэтому к.п.д. рассматриваемого двигателя имеет низкие значения. Из-за больших потерь приходится увеличивать размеры двигателя, чтобы получились достаточные поверхности охлаждения.
|
3-1.
3-23. |