| Глава 3. Асинхронные машины | |
|---|---|
| 3-29. Асинхронные машины для синхронной связи | часть 4 |
|
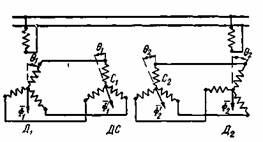
Если теперь повернуть ротор сельсина СД на некоторый угол θ, то токи в фазах обмоток СД и СП изменяются и ось н.с. обмотки СП также повернется на угол θ. При этом на зажимах обмотки ВП возникнет напряжение, зависящее от угла θ. Оно непосредственно воздействует на усилитель У, выход которого соединен с исполнительным двигателем ИД. Двигатель ИД приводит в действие нагрузку и одновременно поворачивает ротор СТ в такое положение, при котором ось н.с. его обмотки СП снова будет сдвинута на 90° относительно оси обмотки ВП. Таким образом, нагрузочный механизм будет повторять повороты или вращение ротора СД. Исполнительный механизм и датчик СД не нуждаются в механической связи и могут быть расположены на большом расстоянии один от другого, причем линия связи Л здесь не требует больших затрат, так как передаваемая ею мощность (в соответствии с мощностью СД и СТ) весьма мала. Если необходимо осуществить управление из двух пунктов, применяется дифференциальный сельсин. В отличие от ранее рассмотренных сельсинов он имеет на роторе и на статоре трехфазные обмотки и используется обычно в качестве приемника, а в качестве датчиков для него служат два однофазных сельсина (рис. 3-118). Рис. 3-118. Схема управления дифференциальным сельсином-приемником ДС при помощи двух обычных сельсинов-датчиков Д1 и Д2. Работа дифференциального сельсина протекает следующим образом.
Предположим, что ротор датчика
D1
совершил поворот по часовой стрелке на угол θ1. При этом ось
н.с. обмотки С1 и создаваемого ею потока
|
3-1. |