| Глава 4. Синхронные машины | |
|---|---|
| 4-3.8. Характеристики и векторные диаграммы | Часть 4 |
|
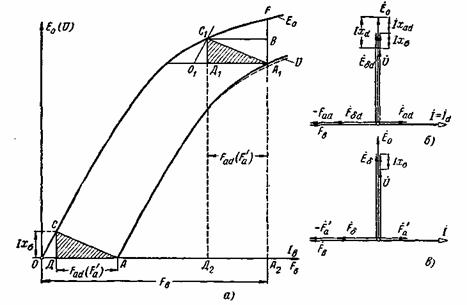
б) Индукционная нагрузочная характеристика. Из нагрузочных характеристик, представляющих собой зависимости U = f(Iв) при I = const и cos φ = const, практическое значение имеет лишь нагрузочная характеристика при cosφ = 0. Будем ее называть индукционной нагрузочной характеристикой. Она может быть снята при использовании в качестве нагрузки другой синхронной машины, включенной на параллельную работу с испытуемой (см. § 4-7).
Если характеристика снимается опытным путем
при нагрузке генератора на реактивную катушку, то
cos
φ,
очевидно, нельзя установить равным нулю. Однако опыт показывает, что при
снятии рассматриваемой характеристики достаточно установить
cos
φ
На рис. 4-37,а представлена индукционная нагрузочная характеристика. Рис. 4-37. Индукционная нагрузочная характеристика и определение сторон реактивного треугольника.
Ее точка А в соответствии с тем
током, для которого она снималась, может быть взята из характеристики
короткого замыкания (рис. 4-34). На
рис. 4-37,а, кроме индукционной
нагрузочной, изображена также характеристика холостого хода Е0.
При помощи этих двух характеристик можно определить, как будет показано,
сопротивление хσ и н.с. реакции якоря
Fad
(в случае явнополюсной машины) или
Покажем вначале, как может быть построена
индукционная нагрузочная характеристика, если известны характеристика
холостого хода и катеты реактивного треугольника, т. е.
Iхσ
и
Fad
или
(Id
= I,
так как
|
4-3.
4-4. |