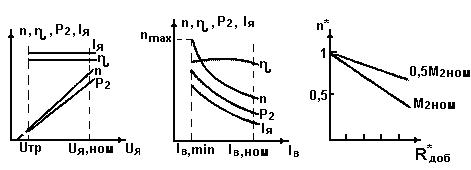
Рис. 2.3. Регулирование частоты вращения двигателя параллельного возбуждения: а - напряжением, подводимым к якорю; б - током возбуждения; в - сопротивлением в цепи якоря.
При заданных М2=const и IB=const двигатель имеет электромагнитный момент М ≈ const и магнитный поток Ф ≈ const. Ток якоря независимо от напряжения остается примерно постоянным IЯ=M/смФ~const.
Из выражения (2.1) имеем п=UЯ/сеФ-IЯ ΣRЯ/сеФ=n0,е-Δn, где n0,е~UЯ, а Δn &asymp const. Зависимость n=f(UЯ) выражается прямой линией, смещенной вправо по оси абсцисс на величину UТР=IЯ ΣRЯ. Напряжение UТР - минимальное напряжение, при котором двигатель начинает вращаться при заданном моменте нагрузки.
Полезная мощность двигателя Р2=0,105М2п~IЯ, кпд двигателя η=Р2/Р1=0,105М2п/(UЯIЯ+UIB)=f(UЯ)≈const. При этом способе регулирования частоту вращения регулируют вниз от номинальной при высоком и практически постоянном кпд двигателя.
б) Характеристики двигателя при регулировании частоты вращения изменением тока возбуждения показаны на рис. 2.3 б.
При заданных М2=const и UЯ=const и без учета насыщения двигатель имеет Ф~IB. Зависимости IЯ, п, P2=f(IB) обратно пропорциональны Ф или IB, а зависимость η=f(IB) ≈ const. С учетом насыщения магнитной цепи, характеристики идут несколько выше математических гипербол. Регулирование частоты вращения осуществляется вверх от номинальной при высоком и примерно постоянном кпд.
в) Характеристики двигателя при регулировании частоты вращения изменением сопротивления в цепи якоря показаны в относительных единицах на рис. 2.3 в.
Сначала строят на одном графике (рис. 2.4) естественную механическую характеристику n=f(M2) при RДОБ=0 (из п. 3) и реостатные механические характеристики n=f(M2) при RДОБ=const. Из этих характеристик получают зависимости в относительных единицах: n*=f(R*ДОБ) при U=UHOM, IB=IBНОМ, М=const (рис. 2.3 в). Здесь n*=п/n0,е, R*ДОБ=RДОБ/ΣRЯ - относительные значения частоты вращения и добавочного сопротивления в цепи якоря; п, n0,е - частоты вращения, определяемые соответственно по реостатной и естественной механическим характеристикам при заданном моменте нагрузки.
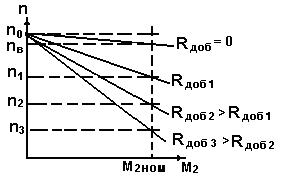
Регулирование частоты вращения осуществляется вниз от номинальной в широком диапазоне. При этом в регулировочном реостате возникают большие потери энергии, что приводит к снижению кпд системы электропривода.
3. Регулировочная характеристика двигателя
Контрольные вопросы
Литература