![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
Лабораторная работа №2
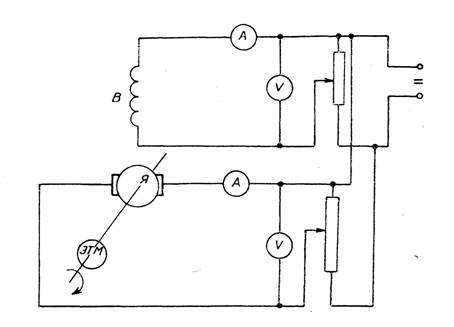
Пояснения и указания к работе Одна из возможных схем для испытания двигателя представлена на рис. 2.1.
Рис.2.1. Схема исследования исполнительного двигателя постоянного тока Для измерения вращающего момента двигателя можно применить электромагнитный тормоз. Может быть использовано и другое тормозное устройство. Частота вращения измеряется строботахометром, часовым или обычным тахометром. При измерении частоты вращения строботахометром необходимо тщательно следить за правильностью отсчета, не допуская ошибок в выборе коэффициента кратности [1]. Пределы измеренных частот вращения должны быть установлены в соответствии с паспортными данными двигателя и ожидаемыми при снятии характеристик значениями. Следует обратить внимание на ожидаемые пределы измерения частот вращения в характеристиках двигателя при полюсном управлении. Перед началом испытаний необходимо ознакомиться с конструкцией двигателя и его паспортными данными, рассчитать на основе паспортных данных номинальный вращающий момент двигателя (Н·м):
MH=9,55РRH/nH
где РRH— номинальная полезная мощность, Вт; пн — номинальный вращающий момент, об/мин. Далее, следует осуществить пуск в ход двигателя и изменение направления вращения. При обоих направлениях вращения проверяется частота вращения при номинальной нагрузке (М = МН) и коэффициенте сигнала α=1 (Uy=Uв= Uн). Для получения стабильных характеристик испытуемого двигателя целесообразно предварительно нагрузить его номинальным моментом и дать поработать при постоянной нагрузке 15—20 минут. За это время температура обмоток практически установится. Рабочие характеристики. Они представляют собой зависимости Iв, Iу, Рв, Ру, М, η от п при Uв= const и Uy= const. Рабочие характеристики получаются изменением механической нагрузки на валу двигателя в диапазоне изменения частот вращения от холостого хода (n= nх0i при М = 0) до остановки (n = 0). Рабочие характеристики снимаются при двух способах управления: 1) якорном; 2) полюсном. Рабочие характеристики снимаются для коэффициентов сигнала α=1 (Uy=Uв=Uн) и α=0,5 (Uy =0,5Uн). В том случае, когда α=1, рабочие характеристики при якорном и полюсном управлении совпадают. Для получения рабочих характеристик необходимо выделить три основных режима работы двигателя и определить для них моменты, мощности, токи, частоты вращения: при холостом ходе, номинальной нагрузке или близкой к ней, коротком замыкании. Начальный пусковой момент Мк при n=0 определяется с помощью тормозного устройства при включении обмоток заторможенного двигателя на напряжения Uв и Uy, соответствующие заданным сигналам α=1 и α= 0,5. После снятия рабочих характеристик рекомендуется для контроля правильности измерений построить механические характеристики в размерных единицах, а также зависимости полезной мощности от частоты вращения. Для построения механических характеристик в относительных единицах необходимо рассчитать базовые величины, которые определяются в процессе, снятия рабочих характеристик следующим образом: частота вращения при «идеальном» холостом ходе (об/мин) nx0=Uнni/Ei, где Uн — номинальное напряжение двигателя, В; пi — частота вращения при произвольной нагрузке и α=1; Ei=Uн- Iяrя— ЭДС, соответствующая этой нагрузке, В; Iя — ток якоря, соответствующий той же нагрузке, А; rя — сопротивление обмотки якоря, Ом. Базовые момент Мк0 и мощность Рук0 определяются из опыта в пусковом режиме (n=0) при α=1. Регулировочные характеристики снимаются для постоянного момента на валу двигателя: а) при якорном управлении для M =0 и М=0,5Mk0 б) при полюсном управлении для М = 0; М=0,2 Мk0 и М=0,5Мk0. При снятии регулировочных характеристик необходимо точно фиксировать напряжение трогания Uy трог, соответствующее частоте вращения n= 0. Напряжение управления в процессе опыта изменяется в пределах от 0 до 1,25Uн. При якорном управлении для построения характеристик снимаются значения в 3—4 точках, так как регулировочные характеристики линейны. При полюсном управлении число точек должно быть большим. Зависимость мощности управления от коэффициента сигнала снимается при постоянной частоте вращения для двух случаев: при неподвижном роторе (n=0) и при частоте вращения п=пн. В процессе снятия зависимости Py=(Uy) при n=nн для поддержания постоянной частоты вращения, изменяющейся при изменении сигнала, следует менять соответствующим образов тормозной момент.
|
|