ИССЛЕДОВАНИЕ ЭЛЕКТРИЧЕСКИХ МАШИН С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ
|
. ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ ПРИ ТИРИСТОРНОМ РЕГУЛИРОВАНИИ |
|
|
Введение |
Лабораторная работа №2. Введение Целью работы является исследование характеристик асинхронного двигателя с фазным ротором при изменении напряжения посредством тиристорного регулятора.
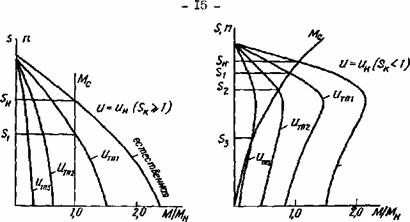
Предварительные сведения: Изменение напряжения асинхронного двигателя приводит к изменению критического момента, тогда как критическое скольжение остается постоянным. Эти следует из известных зависимостей:
Здесь Отсюда следует, что максимальный момент при уменьшении напряжения снижается пропорционально квадрату напряжения
где
Из выражений (I) и (2) следует, что
скольжение не зависит' от напряжения и остается неизменным. Также не
изменяется и синхронная угловая скорость
Рис.1 Рис.2
По мере снижения напряжения статора угловая частота ротора при постоянном моменте сопротивления уменьшается. Однако при этом снижается и максимальный момент двигателя, поэтому при постоянном моменте нагрузки диапазон регулирования скорости ограничен. 8 двигателях с повышенный активным сопротивлением ротора диапазон регулирования расширяется (рис. I), однако потери в роторе при этом растут и КПД двигателя снижается, особенно при пониженных частотах вращения. Ухудшение режима работы двигателя объясняется тем, что при заданном скольжении ток двигателя пропорционален напряжению питания, а электромагнитный момент зависит от квадрата этого напряжения. Поэтому по мере снижения скорости отношение момента к току падает и для получения сравнительно небольших моментов при низких скоростях требуются значительные токи. Однако при вентиляторном характере нагрузки момент изменяется примерно пропорционально квадрату угловой скорости. Следовательно, момент, требующийся при пуске и небольших угловых скоростях, мал и может быть получен без чрезмерного выделения тепла регулированием напряжения (рис. 2).
Приведенные сведения лежат в основе фазового регулирования. Для его
осуществления между выводами статора и фазами сети включаются
тиристорные регуляторы (рис. 3). Регулируя интервалы проводимости
тиристоров в этой схеме, можно изменять действующее значение
приложенного к двигателю напряжения
Рис.3
Рассмотрим принцип фазового регулирования на примере схемы
однофазного однополупериодного выпрямления (рис. 4а). До тех пор,
пока тиристор не будет открыт, протекание тока в обоих направлениях
блокируется. Если управляющий импульс
Рис.4
Если схему однополупериодного выпрямления дополнить тиристором, как
это показано на рис.5, то обеспечивается возможность регулирования
напряжения переменного тока. В этой схеме тиристоры включены
встречно-параллельно и открываются в одни и те же моменты времени по
отношению к соответствующим анодным напряжениям, поэтому к нагрузке
прикладывается симметричное напряжение. На рис.5в показаны формы
кривых напряжения и тока для чисто активной нагрузки. При наличии
индуктивностей, так же как и в предыдущем случае, протекание тока
поддерживается индуктированной ЭДС в течение некоторого промежутка
времени после изменения полярности напряжения источника.
Длительность этого промежутка определяется коэффициентом мощности
нагрузки. При этом возможны два режима работы. Обозначим через
Рис.5
Схема с двумя встречно-параллельно включенными тиристорами является основной. Она используется при работе тиристорного регулятора, приведенного на рис.3. Для получения симметричной системы напряжений управляющие импульсы каждой группы тиристоров должны быть сдвинуты между собой на 120°. Устройства для регулирования напряжения статора значительно проще и дешевле описанных в лабораторной работе №1 преобразователей частоты. Однако КПД асинхронных электроприводов с регуляторами напряжения невысок, поэтому приходится завышать габариты двигателей во избежание превышения их температуры из-за увеличения тока и ухудшения вентиляции. Тиристорные регуляторы напряжения широко используются для электроприводов малой мощности и приводов кранов и лебедок, где большие моменты при низких частотах вращения требуются лишь в течение небольшой части рабочего цикла.
|