|
Снятие индукционной нагрузочной характеристики
При снятии индукционной нагрузочной
характеристики обмотку якоря включают на индуктивное сопротивление
xнагр.
Ротор генератора вращают с номинальной частотой приводным двигателем. Регулируя
ток возбуждения I2
и изменяя
xнагр,
устанавливают номинальный ток якоря
I1н
при напряжении
U1=(1,1—1,1)U1н.
Затем уменьшают ток возбуждения
I2,
что приводит к снижению напряжения
U1
и тока
I1.
После этого уменьшают сопротивление
нагрузки xнагр
так, чтобы сохранить ток якоря
неизменным: I1=I1н.
В таблицу записывают значения
I2
и U1
для 4—5 точек характеристики.
В качестве индуктивного
сопротивления в работе используется регулятор напряжения (РНТ) или индукционный
регулятор (ИР).
Для подключения и регулирования
индуктивного сопротивления необходимо включить ручку переключателя
xнагр
и вращать ручку РНТ или ИР.
Определение расчетного индуктивного
сопротивления (сопротивление Потье) по характеристикам
XX
и нагрузочной показано на рис. 1.5.
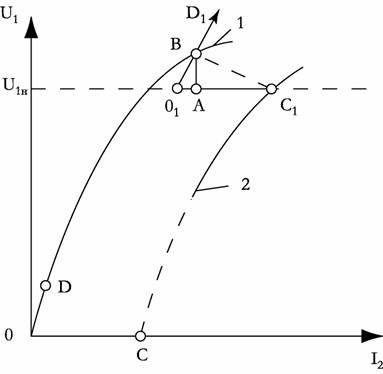
Рис. 1.5 Определение
XP
по характеристикам холостого хода 1 и нагрузочной 2
Индукционная нагрузочная
характеристика продолжается до пересечения с осью абсцисс в точке С.
Точку D
выбирают произвольно на прямолинейной
части характеристики холостого хода. Полученный угол
COD
переносят в положение
C1O1D1
так, чтобы
O1D1||OD и
O1С1||ОС,
а точка С1 совпадала бы с точкой пересечения
нагрузочной характеристики с линией, параллельной оси абсцисс, проведенной из
точки номинального напряжения оси ординат. При этом
O1С1=OC.
Затем из точки В,
определяемой пересечением
O1D1
с характеристикой
XX,
опускают перпендикуляр на линию
O1С1
и
получают точку А (ВА^O1С1).
Расчетное индуктивное сопротивление
определяют как частное от деления отрезка
BA=I1xp, измеренного в масштабе напряжения, на ток якоря, при котором снималась
нагрузочная характеристика

В
относительных единицах

|
