|
Определение синхронных индуктивных сопротивлений
Синхронные индуктивные
сопротивления обмотки якоря
xd
и
xq
определяются в работе из опыта малого
скольжения.
Прежде чем
проводить опыт, следует убедиться, что направление вращения ротора совпадает с
направлением вращения магнитного поля, образуемого МДС якоря. Для этого вначале
вращают ротор приводным двигателем и замечают направление вращения. Затем
определяют направление вращения магнитного поля, запустив синхронную машину от
сети в режиме двигателя асинхронным пуском. Направление вращения ротора при
асинхронном пуске совпадает с направлением вращения магнитного поля.
Принципиальная схема асинхронного пуска показана на рис. 2.1. Обмотку
возбуждения на время пуска включают на активное сопротивление (выключатель ВR
замкнут). К обмотке якоря подводят такое пониженное напряжение от регулятора
напряжения РН, при котором ротор начинает вращаться (в сторону вращения
магнитного поля). Если направление вращении ротора в первом и втором случае
совпадают, то приступают к проведению опыта. Если пет, то изменяют направление
вращения магнитного поля путем изменения чередования фаз сети, к которой
присоединена синхронная машина и еще раз проверяют совпадение направлений
вращения ротора и магнитного поля.
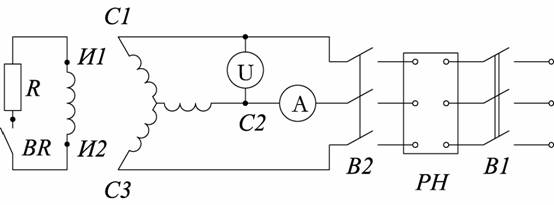
Рис.
2.1 Схема опыта скольжения и опыта вращения ротора против поля.
Для
проведения опыта малого скольжения используют принципиальную схему, изображенную
на рис. 2.1. Обмотка возбуждения должна быть разомкнута (выключатель
BR
разомкнут). Ротор синхронной машины
приводят во вращение приводным двигателем со скоростью, близкой к синхронной,
при которой скольжение не превышает 1%. К обмотке якоря через регулятор
напряжения подводят такое пониженное напряжение, при котором ток якоря меньше
поминального, а ротор не втягивается в синхронизм при малом скольжении.
Взаимное пространственное положение осей магнитного поля и осей полюсов ротора
генератора в опыте скольжения изменяется во времени. При совпадении осей
индуктивное сопротивление обмотки якоря наибольшее, вследствие наименьшего
воздушного зазора па пути магнитного потока, и соответствует синхронному
индуктивному сопротивлению
xd
по продольной оси. Когда ось вращающегося поля окажется в середине между
соседними полюсами (т. е. совпадает с осью
q),
индуктивное сопротивление обмотки якоря наименьшее, вследствие наибольшего
воздушного зазора на пути магнитного поля якоря; это положение ротора
соответствует синхронному индуктивному сопротивлению
xq
обмотки якоря по поперечной оси. При
изменении индуктивного сопротивления обмотки якоря в опыте скольжения ток якоря
изменяется в пределах от
Imin
до Imax.
Это приводит одновременно к колебаниям напряжения на зажимах якоря от
U1
max
до U1
min
из-за изменения падения напряжения в РН при протекании по нему токов
I1
min
или I1
max.
Ток и напряжение якоря измеряют по приборам пли (что предпочтительнее)
записывают с помощью осциллографа его осциллограмму.
Синхронное индуктивное сопротивление
xd,
Ом, по продольной оси вычисляют по формуле
 (2.1)
(2.1)
а синхронное
индуктивное сопротивление
xq,
Ом, по поперечной оси
 (2.2)
(2.2)
где
U1ф
max,
U1ф
min,
I1ф
max,
I1ф
min
— максимальные и минимальные значения фазных напряжения и тока.
Метод определения синхронного
индуктивного сопротивления обмотки якоря по продольной оси
xd
по характеристикам
XX
и симметричного трехфазного КЗ является предпочтительным, так как при этом
получают наиболее точное его значение при ненасыщенной магнитной системе.
Сопротивление
xd
получают как частное от деления напряжения холостого хода, взятого по
прямолинейной (ненасыщенной) части характеристики
XX
или ее продолжению при некотором токе возбуждения (лабораторная работа №1), на
ток короткого замыкания, взятый по характеристике трехфазного короткого
замыкания при том же токе возбуждения (рис. 2.4)
 (2.7)
(2.7)
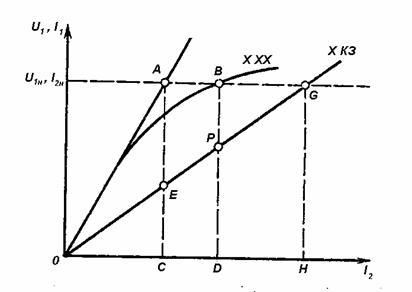
Рис.
2.4 К определению
X2
и ОКЗ по характеристикам холостого хода и короткого замыкания.
Синхронное индуктивное сопротивление
по поперечной оси х,, можно найти по отношению (xd/xq),
полученному из опыта скольжения, и значению
xd,
полученному по (2.7)
 (2.8)
(2.8)
По тем же характеристикам
XX
и КЗ (рис. 2.4) определяют ОКЗ как отношение установившегося тока трехфазного КЗ
при токе возбуждения, соответствующем поминальному напряжению по характеристике
XX,
к номинальному току якоря
 ОКЗ
= ОКЗ
=

|
