|
|
Применение полевых методов в электромагнитных расчетах электрических машин3.2. Моделирование режимов холостого хода и номинальной нагрузки
Рис. 3.4. Картина поля при холостом ходе генератора
Моделирование режима холостого хода выполняется весьма просто – токи задаются только в обмотке возбуждения - на участках пазов статора они принимаются равными нулю, угловое положение ротора, если нас не интересует влияние изменения проводимости зазора при повороте ротора относительно статора, может быть выбрано любым.
Рис. 3.5. Картина поля при номинальной нагрузке генератора. На модели зазор между сердечником полюса и ободом ротора увеличен в 10 раз, во столько же раз увеличена и относительная магнитная проницаемость этого участка модели (μr = 10). Этот прием позволяет избежать ненужного увеличения числа конечных элементов модели
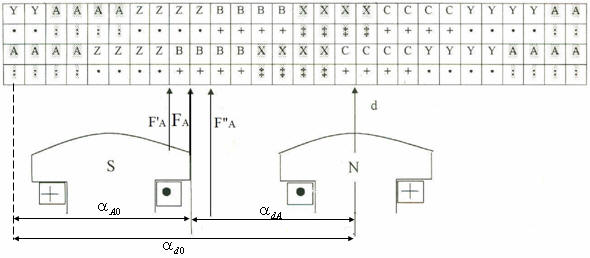
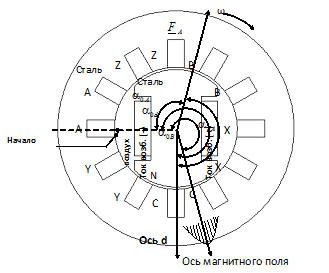
Моделирование номинального режима работы состоит в следующем. На периоде поля (для генератора №1 это период первоначальной обмотки) смоделируем результирующее магнитное поле, созданное обеими обмотками генератора. Угловым положением ротора относительно статора при этом необходимо задаться, например, найдя первое приближение по углу нагрузки из векторной диаграммы, соответствующей номинальному режиму и построенной по значениям параметров, рассчитанным по обычным формулам. Поскольку на модели воспроизводится поле, соответствующее выбранному моменту времени (решается магнитостатическая задача), пространственное положение магнитной оси обмотки якоря оказывается определенным (мгновенные значения токов фаз считаются заданными). Положение магнитной оси обмотки якоря на модели относительно некоторой фиксированной точки (начала отсчета на контуре интегрирования, проведенном посередине воздушного зазора) определяется углом α0А (рис. 3.7). Магнитная ось обмотки якоря ассоциируется с вектором тока якоря на векторной диаграмме. Задав на модели некоторое положение ротора относительно статора, мы определяем углы α0d и αdA. По результатам моделирования, выполнив гармонический анализ распределения индукции в зазоре, мы найдем пространственный фазовый угол основной гармоники поля и угол αdB, определяющий положение полюса результирующего поля в зазоре и, следовательно, угловое положение вектора результирующей ЭДС Er на векторной диаграмме. При вычислении всех перечисленных углов следует внимательно отнестись к выбору положительных направлений: перемещений (направлений вращения поля и ротора на модели, векторов на векторной диаграмме), токов в проводах обмотки, линий поля в зазоре.
Рис. 3.6. К определению угла
Рис. 3.7. К определению углов α0A, α0d, α0B , αdA . FA – магнитная ось трехфазной обмотки в момент времени, когда ток в фазе AX положителен и максимален. Начало отсчета – на оси первого паза.
|