Глава 1.
Вентильно–индукторный двигатель.
Общие сведения.
Структурная
схема вентильно–индукторного двигателя
Вентильно–индукторный двигатель – это
относительно новый тип электромеханического преобразователя энергии, который
сочетает в себе свойства и электрической машины, и интегрированной системы
регулируемого электропривода. Как всякий электродвигатель, он обеспечивает
преобразование электрической энергии, которая поступает от питающей сети, в
механическую энергию, передаваемую в нагрузку. Как система регулируемого
электропривода, ВИД дает возможность осуществлять управление этим процессом в
соответствии с особенностями конкретной нагрузки: регулировать частоту вращения,
момент, мощность и так далее.
ВИД представляет собой достаточно сложную электромехатронную систему, структурная схема которой приведена на рис. 1 [1].
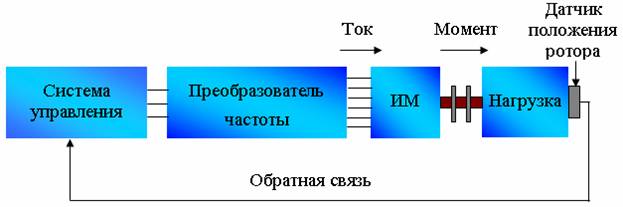
Рис. 1. Структурная схема ВИД.
В ее состав входят: индукторная машина (ИМ), преобразователь частоты, система управления и датчик положения ротора (ДПР). Функциональное назначение этих элементов ВИД очевидно: преобразователь частоты обеспечивает питание фаз ИМ однополярными импульсами напряжения прямоугольной формы; ИМ осуществляет электромеханическое преобразование энергии, система управления в соответствии с заложенным в нее алгоритмом и сигналами обратной связи, поступающими от датчика положения ротора, управляет данным процессом.
По своей структуре ВИД ничем не отличается от классической системы регулируемого электропривода. Именно поэтому он и обладает всеми ее свойствами. Однако в отличие от регулируемого электропривода, например с асинхронным двигателем, ИМ в ВИД не является самодостаточной. Она принципиально неспособна работать без преобразователя частоты и системы управления. Преобразователь частоты и система управления являются неотъемлемыми частями ИМ, необходимыми для осуществления электромеханического преобразования энергии. Это дает право утверждать, что совокупность структурных элементов, представленных на рис. 1, является не только системой регулируемого электропривода, но и электромеханическим преобразователем энергии.
Особенности конструкции индукторной машины
ИМ, входящая в состав ВИД, может иметь различные
конструктивные исполнения. На рис.2., для примера, приведено поперечное сечение
4х–фазной ИМ конфигурации 8/6. При обозначении конфигурации ИМ
первая цифра указывает число полюсов статора, вторая – ротора.
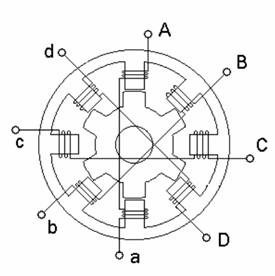
Рис. 2. Поперечное сечение 4х–фазной ИМ конфигурации 8/6.
Анализ рис. 2. показывает, что ИМ имеет следующие конструктивные особенности.
– Сердечники статора и ротора имеют явнополюсную структуру.
– Число полюсов относительно невелико. При этом число полюсов статора больше числа полюсов ротора.
– Сердечники статора и ротора выполняются шихтованными.
– Обмотка
статора – сосредоточенная катушечная. Она может быть одно- или многофазной.
– Фаза ИМ,
как правило, состоит из двух катушек, расположенных на диаметрально
противоположных полюсах статора. Известны ИМ с удвоенным числом полюсов статора
и ротора. В 4х–фазном исполнении они имеют конфигурацию 16/12. Фаза
такой ИМ состоит из двух пар катушек, которые располагаются на полюсах статора
таким образом, что их оси ортогональны.
– Катушки
фазы могут быть соединены в электрическом отношении параллельно или
последовательно; в магнитном – согласно или встречно.
– Обмотка на
роторе ИМ отсутствует.
На рис.4.
приведены ИД различной конфигурации.
a)
б)
в) г)
Рис. 4. Различные конфигурации ИМ:
а) однофазная ИМ
конфигурации 2/2;
б) двухфазная
ИМ конфигурации 4/4;
в) трехфазная ИМ
конфигурации 6/4;
г) четырехфазная ИМ конфигурации 8/6.
Конструктивные
исполнения ВИД
Конструктивно ИМ, преобразователь частоты и система управления в ВИД могут быть выполнены раздельно. При этом в процессе работы они могут находиться на достаточно большом удалении друг от друга.
В последние время в мире
наблюдается устойчивая тенденция выполнения преобразователя частоты и двигателя
в системе регулируемого электропривода в одном корпусе. Такое конструктивное
исполнение в англоязычной литературе получило название combimaster, что на русский язык может
быть переведено как электропривод интегрального исполнения.
В ВИД интегральное
исполнение преобразователя частоты и ИМ является более выгодным по сравнению с
частотно–управляемым асинхронным приводом. Дело в том, что в отличие от
асинхронной, фазы индукторной машины электрически не связаны между собой. Таким
образом, если для соединения 3х–фазного асинхронного двигателя с
преобразователем частоты требуется три провода, то для 3х–фазной
индукторной машины – шесть. Очевидно, что увеличение числа фаз ведет к
увеличению числа соединительных проводов. Следовательно, использование интегрального исполнения ВИД
позволяет существенно снизить расход соединительных проводов или кабелей.
А А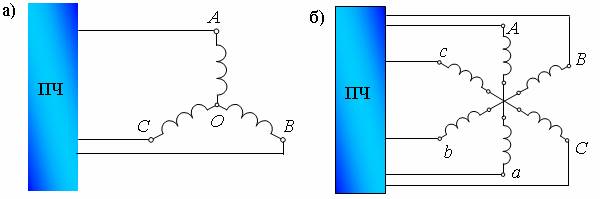
Рис. 3. Схема соединения электрической
машины и преобразователя частоты
а) в частотно–регулируемом
асинхронном электроприводе;
б) в ВИД.
Принцип действия ВИД
Принцип
действия ВИД основан на свойстве ферромагнитных тел ориентироваться во внешнем
магнитном поле таким образом, чтобы пронизывающий их магнитный поток принимал
максимальное значение.
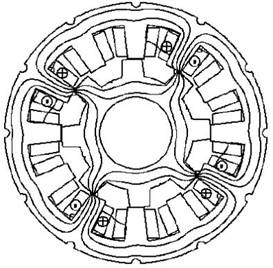
Рис. 4/.
Распределение поля в ВИД конфигурации 12/8.
Рассмотрим
принцип действия ВИД на примере 4х–фазного двигателя c ИМ
конфигурации 8/6. На рис. 4.а показано так называемое рассогласованное взаимное
положение сердечников статора и ротора для фазы А этой машины.
Рис. 4. К
пояснению принципа действия ВИД:
а)
рассогласованное положение сердечников для фазы А;
б)
промежуточное положение сердечников для фазы А;
в)
согласованное положение сердечников для фазы А.
Рассогласованным положением сердечников статора и ротора для
некоторой фазы ИМ называется такое положение, при котором ось каждой катушки
этой фазы совпадает с одной из осей q (рис. 5) ротора, то есть зубцы фазы
располагаются строго напротив пазов ротора. Это положение характеризуется
минимальным значением индуктивности фазы и магнитного потока, сцепленного с
ней, что объясняется максимальным значением магнитного сопротивления зазора
между сердечниками. В теории ВИД рассогласованное положение одной из фаз
принимается за начало отсчета углового положения сердечников статора и ротора.
В рамках данного пособия за начало отсчета принято рассогласованное положение
фазы А.
Рис. 5. Расположение осей d и q ротора ИМ.
Предположим, что
в этом положении по сигналу системы управления произойдет коммутация ключей
преобразователя частоты и к фазе А
будет приложено постоянное напряжение UА, тогда по катушкам фазы
потечет ток iA,
который создаст МДС FA. Эта МДС, в свою очередь, возбудит в машине
магнитное поле.
В магнитном поле фазы А ротор будет стремиться ориентироваться
таким образом, чтобы магнитный поток, пронизывающий его, принял максимальное
значение. При этом на сердечники статора и ротора будут действовать одинаковые
по значению и обратные по направлению пондеромоторные силы (ПС) тяжения. Очевидно,
что силы, действующие на 1ый и 4ый зубцы ротора, будут
стремиться повернуть его по часовой стрелке, а силы, действующие на 2ой
и 5ый зубцы – против. В силу того, что ротор в данном положении
симметричен относительно оси возбужденной фазы, равнодействующая азимутальной
составляющей этих сил будет равна нулю. Таким образом, в рассогласованном
положении ИМ и ВИД не развивают вращающего момента.
Рассогласованное положение
представляет собой точку неустойчивого равновесия. Действительно, если под
действием какого–либо внешнего воздействия ротор отклонится от
рассогласованного положения в том или ином направлении, то равнодействующая азимутальных
составляющих ПС сердечников уже не будет равна нулю. Следовательно, возникнет
вращающий момент, который будет стремиться повернуть ротор в направлении от
рассогласованного положения.
Возьмем другое положение
ротора, показанное на рис. 4.б. Здесь фаза А
имеет большее потокосцепление и индуктивность, чем в рассогласованном положении,
что объясняется меньшей величиной зазора между сердечниками. При этом
равнодействующая азимутальных составляющих ПС сердечников отлична от нуля, и
созданный ею электромагнитный момент стремиться повернуть ротор ИМ против
часовой стрелки.
Вращение ротора будет продолжаться до тех пор, пока он не займет положение, показанное на рис. 4.в Оно называется согласованным положением фазы А.
Согласованным положением сердечников статора и ротора ИМ для какой–либо
фазы называется такое положение, при котором ось каждой катушки этой фазы совпадает
с одной из осей d (рис. 5) ротора,
то есть зубцы фазы располагаются строго напротив полюсов ротора. Это положение
характеризуется максимальным значением индуктивности фазы и сцепленного с ней
магнитного потока, что объясняется минимальной величиной магнитного
сопротивления зазора между сердечниками.
В этом положении ПС притяжения сердечников имеют только радиальные составляющие. В силу чего вращающий момент ИМ в этом положении равен нулю.
Согласованное положение представляет собой точку устойчивого равновесия. Действительно, если под действием какой–либо внешней силы ротор отклонится от согласованного положения в ту или иную сторону, то возникший электромагнитный момент будет стремиться вернуть его в согласованное положение.
Для того чтобы продолжить
однонаправленное вращение ротора, необходимо еще до достижения согласованного
положения фазы А осуществить коммутацию
ключей преобразователя частоты, в результате которой фаза А должна быть отсоединена от источника питания, а фаза, момент
которой стремиться продолжить вращение ротора в прежнем направлении, подключена
к нему. В данном случае это фаза В.
Взаимное положение
сердечников статора и ротора, близкое к согласованному положению для фазы А, является для фазы В близким к рассогласованному положению,
то есть при подаче на нее напряжения и протекании по ее катушкам тока возникнет
отличный от нуля вращающий момент, который будет стремиться повернуть ротор
против часовой стрелки.
г)
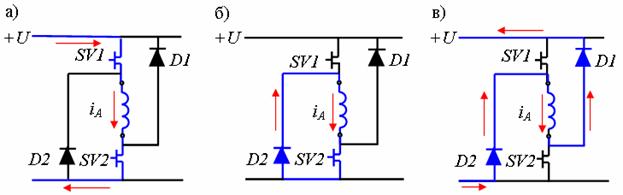
Рис. 6. Контуры замыкания тока в фазе ВИД на интервале коммутации:
а) ключи SV1, SV2 – замкнуты;
б) ключ SV1 – разомкнут, SV2 – замкнут;
в) ключи SV1, SV2 – разомкнуты; к фазе
приложено обратное напряжение;
и демонстрация работы
инвертора (г).
Необходимость коммутации фаз
еще до достижения согласованного положения сердечников диктуется желанием
получить как можно меньшее значение тока в отключаемой фазе при достижении ее
согласованного положения. Дело в том, что после отключения фазы накопленная в
ней энергия магнитного поля не может исчезнуть мгновенно. Она расходуется на
поддержание постоянства потокосцепления фазы, в силу чего в ней возникает ЭДС
самоиндукции, и ток фазы остается отличным от нуля еще некоторое время после ее
коммутации. Он замыкается через встречно включенный диод D2, ключ SV2 преобразователя частоты и
питающую сеть (рис. 6.б). В конечном итоге ток достигнет нулевого значения
(энергия магнитного поля выделится в виде электрических потерь на активных
сопротивлениях фазы, встречно включенного диода D2 и ключа SV2). Однако если этот ток
будет отличен от нуля в согласованном положении фазы, то при дальнейшем
вращении ротора созданное им магнитное поле приведет к возникновению тормозного
электромагнитного момента. С целью более быстрого гашения поля в ИМ после
отключения фазы на нее подают напряжение обратной полярности (рис. 6.в).
Фаза В будет находиться под напряжением до тех пор, пока ротор не
достигнет положения, близкого к согласованному. При достижении этого положения
от ДПР в систему управления поступит соответствующий сигнал, обработка которого
приведет к выдаче управляющего воздействия на преобразователь частоты и переключению
фаз В и С. Цикл повторится.
Таким образом, проводя
последовательную коммутацию фаз, можно осуществить однонаправленное вращение
ротора ИМ. Последовательность коммутации фаз определяется алгоритмом,
заложенным в систему управления. Исходными данными для ее работы являются
сигналы о положении ротора, поступающие от ДПР, что исключает возможность
неправильной коммутации фаз.
Алгоритмы
коммутации фаз ИМ для ВИД
В рассмотренном примере в
каждый момент времени работает только одна фаза ВИД (А–В–С–D–A–…).
Коммутация фаз ИМ, при которой в каждый момент времени
работает только одна его фаза, называется одиночной симметричной (рис. 7.а).
Симметричная коммутация фаз
является наиболее простой. Кроме нее в ИМ возможны парная симметричная
коммутация и несимметричная коммутация фаз.
Коммутация фаз ИМ, при которой в каждый момент времени
работают две фазы двигателя (АВ–BC–CD–DA–AB–…), называется парной симметричной (рис. 7.б).
Коммутация фаз ИМ, при которой попеременно работают то одна,
то две фазы двигателя (A–AB–B–BC–C–CD–D–DA–A–…), называется
несимметричной (рис. 7.в).
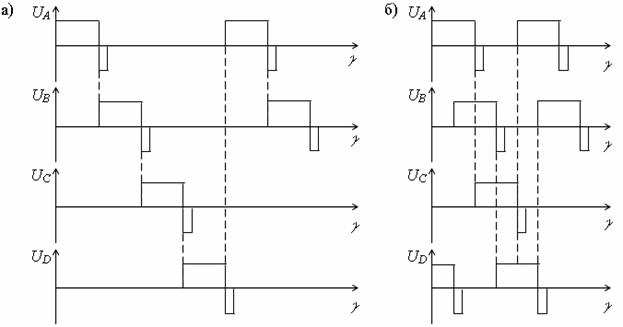
Рис. 7. Последовательность
возбуждения фаз 4х-фазного ВИД конфигурации 8/6 при различных
алгоритмах коммутации:
а) симметричная одиночная
коммутация;
б) симметричная парная
коммутация;
в) несимметричная
коммутация.
Алгоритм коммутации фаз
характеризуется нескольким параметрами:
– количеством тактов в
полном цикле коммутации ζ;
– тактовым углом e, который определяет угол поворота
ротора за один такт коммутации;
– числом тактов на один
оборот ротора ξ.
Тактом коммутации называется интервал времени, в пределах
которого работает только одна фаза или их комбинация и не происходит включение
другой фазы или их комбинации.
Цикл коммутации – это последовательность
уникальных тактов, которая периодически повторяется.
Количество тактов в полном
цикле для случая симметричной одиночной или парной коммутации равно числу фаз,
то есть
ζ=m, (1)
а для случая несимметричной
коммутации определяется удвоенным числом фаз
ζ=2m, (2)
Тактовый угол e в общем случае может быть найден по формуле
 ,
(3)
,
(3)
где ![]() – число зубцов ротора.
– число зубцов ротора.
Используя последнее
соотношение, легко получить выражение для количества тактов на один оборот
ротора
![]() .
(4)
.
(4)
В Приложении 1 приведены параметры алгоритмов
коммутации ВИД с ИМ наиболее часто встречающихся на практике конфигураций.
Связь между частотой возбуждения фаз ИМ f
и частотой вращения ротора n
Предположим, что
ротор двигателя вращается с частотой n=60 об/мин. Очевидно, что частота следования импульсов
напряжения, прикладываемого к одной фазе двигателя, в этом случае равна
 (5)
(5)
Коэффициенты ![]() и
и ![]() в формуле (5) для симметричной парной и
несимметричной коммутации, объясняются тем,
в формуле (5) для симметричной парной и
несимметричной коммутации, объясняются тем,
что каждая фаза работает на двух и трех тактах соответственно.
Таким образом, если двигатель имеет произвольную частоту вращения n об/мин,
то частота следования импульсов напряжения может быть определена исходя из
соотношения
 (6.а)
(6.а)
или
 (6.б)
(6.б)
В Приложении 2 приведена зависимость частоты
вращения ВИД от конфигурации магнитной системы ИМ.
Коэффициент электромагнитной редукции ВИД
Число NR в (6.б) всегда больше единицы, поэтому частота вращения поля в ИМ ![]() всегда выше частоты вращения ротора
всегда выше частоты вращения ротора ![]() .
.
Отношение частоты вращения магнитного поля к частоте
вращения ротора в ВИД называется коэффициентом электромагнитной редукции kЭР,
где
kЭР=![]() , (7)
, (7)
где k– коэффициент, равный 1, ![]() и
и ![]() для случаев симметричной одиночной и парной,
несимметричной коммутации соответственно.
для случаев симметричной одиночной и парной,
несимметричной коммутации соответственно.
kЭР
определяется конструкцией двигателя (числом полюсов ротора NR) и алгоритмом управления коммутации фаз (числом тактов в полном цикле
коммутации ζ).
В Приложении 3 приведены значения коэффициента электромагнитной
редукции ВИД и частоты следования импульсов питающего напряжения при различных
конфигурациях ИМ и частоте вращения n=3000
об/мин.
Кривые тока фаз ИМ
Фаза ВИД
представляет собой электрическую цепь, значение тока i в
которой определяется приложенным к ней напряжением U, активным сопротивлением r и
наведенной в фазе ЭДС e
![]() (8)
(8)
Рис. 8. Фаза ИМ.
На рабочем
интервале к фазе прикладывается постоянное напряжение, которое инвертируется в
момент коммутации. ЭДС, наводимая в
фазе, обусловлена изменением сцепленного с ней магнитного потока
![]() (9)
(9)
При вращении
ротора от рассогласованного γu к согласованному γa положению магнитное сопротивление протеканию
магнитного потока плавно уменьшается, что приводит к возрастанию
потокосцепления фазы. Качественный характер данной зависимости для фазы А приведен на рис. 9. Там же приведена
кривая ЭДС фазы, полученная путем дифференцирования кривой потокосцепления. Эти
зависимости построены в предположении, что напряжение подается на фазу при
угловом положении сердечников γon > γu, и инвертируется при γoff < γa.
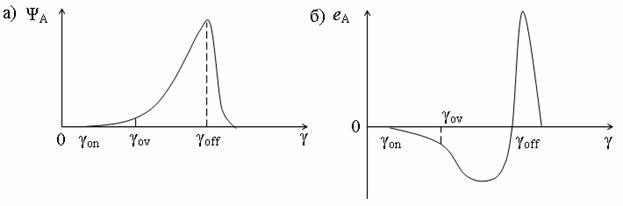
Рис. 9. Кривые изменения потокосцепления
фазы (а) и наведенной в ней ЭДС (б):
γ1 – угол,
соответствующий началу перекрытия зубцов статора и ротора.
Наводимая в фазе
ЭДС всегда направлена навстречу приложенному к фазе напряжению и нередко
называется противо ЭДС.
Проведенные
рассуждения дают возможность построить качественную зависимость кривой фазного
тока (рис. 10).
Рис. 10. Кривая фазного тока ИМ.
На данной
зависимости четко прослеживаются три характерных участока:
– участок резкого
нарастания тока (γon<γ< γ1);
– участок медленного спадания тока (γ1<γ< γoff);
– участок быстрого уменьшения тока до нулевого
значения (γ >γoff).
Подача напряжения
на фазу ВИД осуществляется в положении, близком к рассогласованному (γu<γ<
γ1).
Резкое нарастание
тока происходит при низком значении противо-ЭДС, которое наблюдается на интервале
от рассогласованного положения γu до начала перекрытия полюсов статора и ротора
γ1. Замедление роста тока или даже его снижение на втором
участке обусловлено резким нарастанием противо-ЭДС. Второй участок занимает
угловой интервал от начала перекрытия
полюсов статора и ротора γ1 до момента отключения фазы от
источника питания γoff
(инвертирования напряжения). Третий участок сопровождается более резким по
сравнению со вторым спаданием тока, что обусловлено тем, что на этом участке к
фазе приложено напряжение обратной полярности.
Анализ рис. 10.
позволяет сделать вывод о том, что ток фазы ИМ имеет
резко несинусоидальный характер.
В заключение
данного раздела заметим, что характер кривой фазного тока зависит не только от величины
приложенного напряжения, но и от частоты вращения ротора и углов включения и
отключения фазы. На рис. 11. показаны зависимости фазного тока при относительно
небольшой частоте вращения и различных углах коммутации γon, γoff.
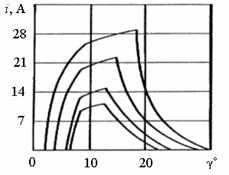
Рис. 10. Фазные токи при низких частотах
вращения и разных углах коммутации в ВИД конфигурации 8/6.
Магнитное поле в ИМ
Характер поля в электрической машине определяется поведением
пространственного вектора F МДС
ее обмоток. В традиционных типах электромеханических преобразователей энергии
магнитное поле может быть круговым, эллиптическим или пульсирующим (рис.11).
Рис. 12. Характер поля в электромеханических преобразователях
классического типа: а) круговое; б) эллиптическое; в) пульсирующее.
В ИМ поле носит более сложный характер по сравнению с полем в
традиционных электрических машинах.
Проведем анализ поведения вектора F в
4х-фазном ИМ для случая идеальной симметричной одиночной коммутации.
Под идеальной симметричной одиночной коммутацией здесь понимается алгоритм управления,
при котором углы включения и отключения фаз подобраны таким образом, что
взаимного перекрытия токовых волн соседних фаз не происходит (рис. 13.)
Рис.
13. Токи фаз при идеальной симметричной одиночной коммутации в ВИД 4х-фазной
ИМ.
Исходя из определения алгоритма симметричной одиночной коммутации фаз,
в каждый момент времени работает только одна фаза. Следовательно, в пределах
каждого такта коммутации направление вектора МДС в пространстве остается
неизменным, а его величина изменяется в соответствии с изменением тока возбужденной
фазы от нулевого значения в начале такта коммутации через максимальное значение
до нулевого значения в конце такта коммутации.
В момент перехода системы из одного такта коммутации в другой вектор МДС
ВИД изменяет свою ориентацию в пространстве на величину тактового угла.
Количество положений вектора МДС в пространстве определяется числом фаз
двигателя.
Напомним, что фазы ИМ питаются однополярными импульсами напряжения. Поэтому
после окончания полного цикла коммутации (рис. 14.г), вектор МДС возвращается в
свое первоначальное положение (рис. 14.д).
Рис. 14. Поведение вектора МДС в 4х-фазном ВИД с ИМ
конфигурации 8/6 для случая идеальной симметричной одиночной коммутации:
а) включена фаза А; б) включена фаза В; в) включена фаза С;
г) включена фаза D; д) включена фаза А.
В рассмотренном примере вектор МДС принимает в процессе работы
двигателя строго определенные дискретные положения в пространстве. Причем в каждом
таком положении поле носит пульсирующий характер. Таким образом, при идеальной
симметричной одиночной коммутации фаз ВИД поле может быть охарактеризовано как
дискретно–пульсирующие.
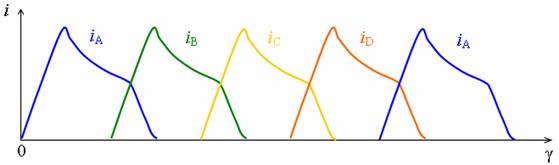
Рис. 15.
Фазные токи при реальной симметричной одиночной коммутации в 4х-фазной
ИМ.
Случай идеальной
симметричной одиночной коммутации фаз является идеальным, хотя
принципиально он может быть реализован. На практике при использовании симметричной
одиночной коммутации токовые волны соседних фаз перекрывают друг друга (рис.
15). Это явление в еще большей степени проявляется при использовании других
алгоритмов управления. Таким образом, результирующий вектор МДС за полный цикл
коммутации осуществляет плавный поворот в пространстве от оси первой до оси
последней фазы двигателя. После чего он возвращается в исходное положение и
цикл повторяется. При этом амплитуда вектора МДС несколько раз изменяется от
некоторого минимального до некоторого максимального значения. Годограф МДС
имеет вид, представленный на рис. 16.
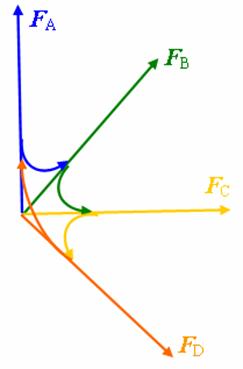
Рис. 16. Годограф вектора МДС в 4х-фазной
ИМ при реальной симметричной одиночной коммутации.
Можно сделать вывод о том, что магнитное поле в ВИД принципиально не
может быть ни круговым, ни эллиптическим, ни даже пульсирующим в обычном
понимании. Оно имеет сложный характер и в пределе стремится к
дискретно–пульсирующему.
Следует также отметить, что вектора МДС и
ротор ИМ имеют различные направления вращения. Это означает, что если
переключение фаз происходит, например, по часовой стрелке, то есть А–В–С–D–A–…
(рис. 4), то вращение магнитного поля и ротора – против, то есть А–D–C–B–A–…
Кривая
изменения мгновенного момента фазы ВИД
Исходя из принципа
действия ВИД, каждая его фаза может развивать ненулевой вращающий момент в двигательном
режиме на интервале от рассогласованного до согласованного положения. Этот
интервал называется абсолютной моментной зоной и определяется соотношением
 .
(10)
.
(10)
На границах
абсолютной моментной зоны момент, развиваемый фазой, принимает нулевое
значение. Примерный характер его изменения внутри нее показан на рис. 17.
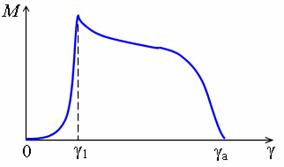
Рис. 17. Кривая мгновенного момента фазы
двигателя.
Экспериментальные
исследования данной зависимости показывают, что максимальный момент фаза
развивает на интервале увеличения взаимного перекрытия полюсов статора и
ротора. Этот интервал называется эффективной
моментной зоной фазы и определяется как
γeff =min(![]() ) ,
(11)
) ,
(11)
где ![]() – угловой размер
полюсов ротора и статора.
– угловой размер
полюсов ротора и статора.
На рис. 18 показана кривая момента, развиваемого фазами при одиночной коммутации.
Ее анализ позволяет сделать вывод о том, что момент
ВИД не является величиной постоянной и характеризуется пульсациями, которые
приводят к нестабильности частоты вращения.
Несколько снизить пульсации момента ВИД можно за счет использования парной
или несимметричной коммутации фаз.
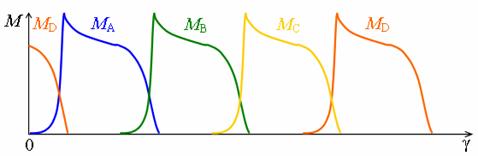
Рис. 18. Момент 4х-фазного ИМ
при симметричной одиночной коммутации.
Шумы и вибрации ВИД
Пондеромоторные силы
взаимодействия сердечников статора и ротора в ВИД имеют две составляющих:
азимутальную, определяющую вращающий момент двигателя, и радиальную, наличие
которой влечет за собой деформацию сердечников. Деформация сердечников приводит
к возникновению вибрации двигателя и излучению звуковых волн. Исследования
показывают, что основным элементом конструкции ВИД, излучающим звуковые волны,
является сердечник статора.
Момент и создающие его силы
имеют резко несинусоидальный характер и могут быть разложены в ряд Фурье. Как
всякая механическая система, сердечник статора имеет резонансные частоты
собственных колебаний. При совпадении частоты какой–либо гармоники
пондеромоторной силы с одной из собственных частот колебаний статора возникает
явление механического резонанса, которое сопровождается резким возрастанием амплитуды
деформаций сердечника по данной гармонике, и, следовательно, уровня шума излучаемого
двигателем. Исследования показывают, что наиболее важными являются первые три
резонансные частоты. Характер деформаций статора при возникновении
резонанса по ним для случая 3х-фазного двигателя конфигурации 6/4
представлен на рис. 19, 20 и 21.

|
Рис. 19. Деформация
статора при резонансе по первой резонансной частоте. |
Рис. 20. Деформация статора при резонансе по
второй резонансной частоте |

Рис. 21. Деформация статора при
резонансе по третьей резонансной частоте.
Рис. 21.а. Деформация
сердечника статора при работе ВИД.
Для снижения
уровня шумов и вибраций следует проектировать ВИД таким образом, чтобы
резонансные частоты сердечника статора принимали как можно большие значения.
При этом резко снижается вероятность того, что первые гармоники в кривой пондеромоторной
силы будут иметь частоты, совпадающие с резонансными.
Достоинства и
недостатки ВИД
Ранее уже отмечалось, что
ВИД является и электрической машиной, и интегрированной системой регулируемого
привода. Он представляет собой органическое единство ИМ, преобразователя
частоты и микропроцессорной системы управления. Поэтому все его достоинства и
недостатки можно разделить на две группы:
– характеристики, обусловленные
ИМ;
– характеристики,
обусловленные преобразователем частоты и системой управления;
В соответствии с этими
группами ниже приведены достоинства и недостатки ВИД.
Достоинства ВИД и недостатки, обусловленные ИМ: